液晶弹性体(LCE),是一种轻微交联的液晶聚合物网络。在磁场、电场、温度或预拉伸的影响下能够进行可逆的变形。由于它们的致动特性,液晶弹性体常常被用来制作软机器人或人造肌肉,是非常有吸引力的候选者。

研究人员选择用加热的方式驱动液晶弹性体,利用光刻技术将加热层嵌入了液晶弹性体中。“起重机”的折叠结构是一种称为Sarrus联动的机制,可以使单个驱动肌肉可以在两个方向上折叠。图中红色和蓝色的箭头分别表示致动器的加热和冷却状态。当液晶弹性体被加热时,致动器处于弹出状态;材料被冷却后,致动器自动缩回扁平状。
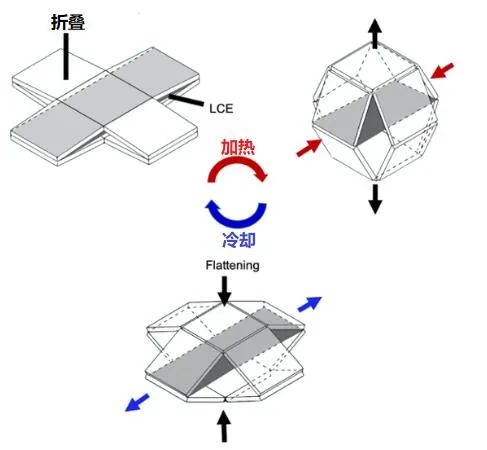
“起重机”的收缩与液晶弹性体的加热时间有关,研究人员发现,当加热到30s左右,材料的应变能力达到峰值,“起重机”完全展开,折叠角最大为64°;当加热停止时,液晶弹性体开始立刻松弛,但要达到完全松弛状态需要2分钟。“起重机”的负重能力随温度的增加而增加。在启动状态,眨眼间便可抬起20g的负载。研究人眼预测它的最大负载能力可达到700g,但在施加200g的重量时,顶层材料开始倾斜使重物掉落。

研究人员将三个“起重机”模块连接组成爬行机器人,并分配每个模块的收缩与松弛序列。连接在一起的模块在启动时会互相约束,因此发生倾斜。
当第一个模块收缩并倾斜时,它就开始将运动波传播到第二个模块,第二个模块收缩并倾斜使它就充当爬虫的锚点(高摩擦力点),这时第一个模块松弛下来,第三个模块收缩成为锚点,而前两个模块一起松弛,是机器人产生运动。这种行为使机器人的运动方向与驱动顺序相反,例如,从第一个模块开始驱动时,机器人向后爬行了17mm;而从第三个模块驱动,机器人则向前爬行了10mm。
液晶弹性体(LCE)制作折叠机器人的最大的挑战在于,它的致动是热驱动的,因此从激活到松弛的时间过长,也不利于节能。未来的工作集中在调整液晶弹性体的性能上,以使其达到较低的转变温度。
原文链接
https://robot.m.ofweek.com/2020-07/ART-8321200-8130-30450211_2.html